(图片来源于网络)
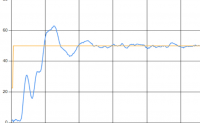
我们已经知道,MPU6050可以获得加速度和角速度,但是由于传感器的噪声信号比较大,无法直接通过两个数据来获得该轴上的角度。因此,需要进行互补滤波来近似得到一个比较准确的角度。
传感器原始数据特点分析:
加速度数据,不是很准确,但是趋势是对的,通过受力分能够显示角度变化趋势,在长期变化来看是可以利用的。
角速度数据,加速度积分得到角度,但……继续阅读 »
求索
6年前 (2018-10-27) 4730浏览 0评论
14个赞
1,PID算法简介
PID算法是当下应用最广泛的控制算法,它具有结构简单,易于理解,控制效果直观,参数较为整定简单,变形多样等优点,更有甚者称之为万能控制算法。
但是,严格意义上讲,PID算法仅仅对线性系统,或近似线性系统,或系统常处于线性段的系统能够取得良好的控制效果。
(线性系统判断依据——满足叠加原理)
那么,对于一个非线性的控制,我们常使用一些PID……继续阅读 »
求索
6年前 (2018-10-27) 3561浏览 0评论
2个赞